🧠 What Is NeuroDesign in HRI?
NeuroDesign in Human-Robot Interaction (HRI) is an emerging interdisciplinary approach that brings together principles from neuroscience, cognitive and behavioral psychology, robotics, AI, and human-centered interaction design to create human-robot systems that are not just about performance metrics—but creating experiences that deeply intuitive, ergonomic, emotionally resonant, and cognitively aligned with the human brain and body. Rather than focusing only on technical performance, NeuroDesign emphasizes designing interactions that feel natural, adaptive, and socially meaningful.
It emphasizes designing at every level of the system: from the physical form factor of the robot to its internal software, AI and control logic; from multi-modal sensing strategies (e.g., EEG, EMG, IMU, voice, vision, etc.) to interaction flows and feedback mechanisms—every element is co-designed to create seamless, brain-centered experiences. Whether it’s a robot adjusting its behavior based on your mental fatigue, a soft exosuit synchronizing with your intention and muscle activity, or a socially assistive robot responding to your emotional state through haptics and voice, NeuroDesign focuses on creating interactions that feel natural to the brain and body—smooth, engaging, and human-centered.
At its core, NeuroDesign covers both cognitive human-robot interaction (cHRI) and physical human-robot interaction (pHRI). It supports four fundamental modes of brain-body-robot interaction, each representing a bidirectional loop between human and machine:
🔺 (1) Human Brain ⟷ Robot Brain (cHRI)
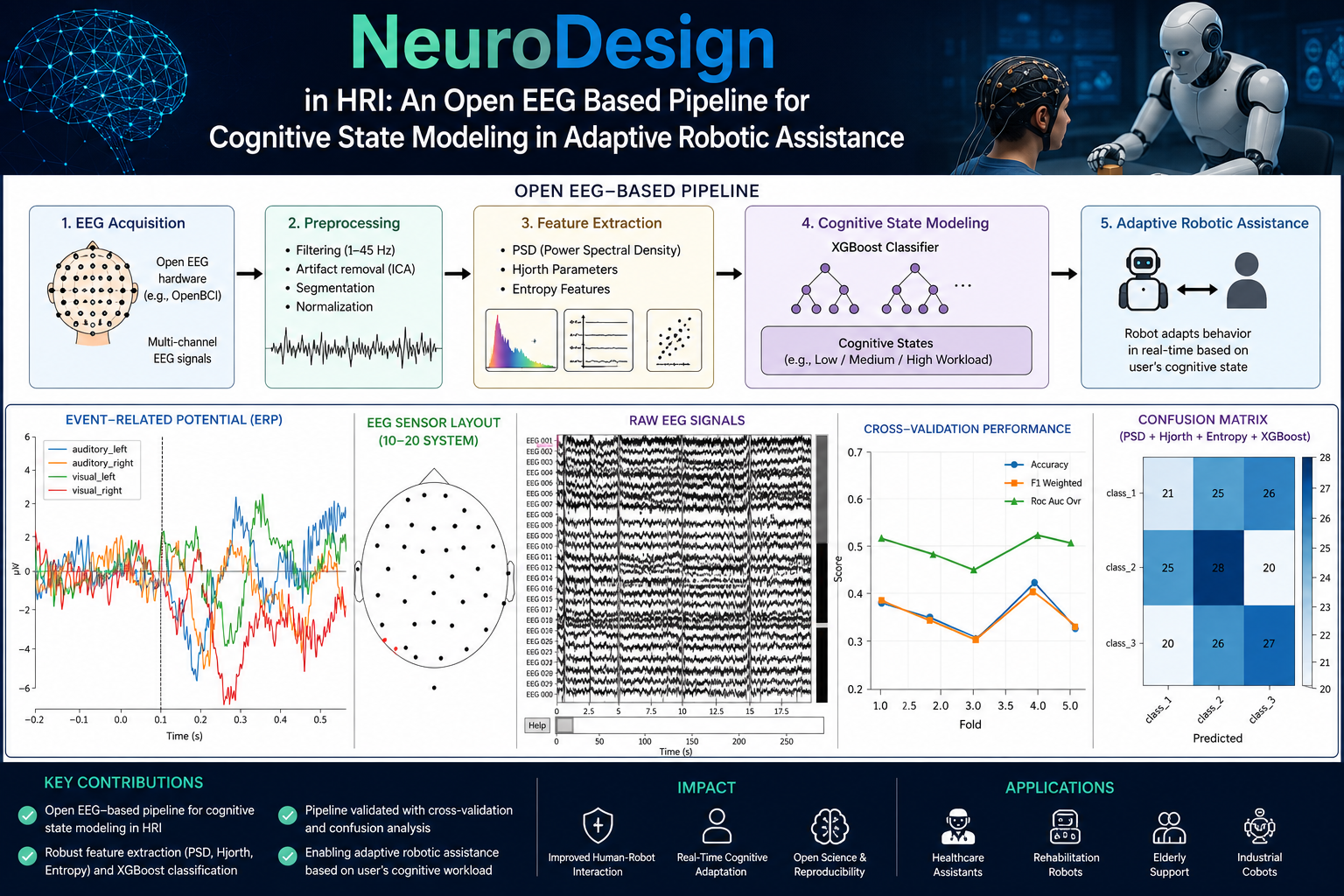
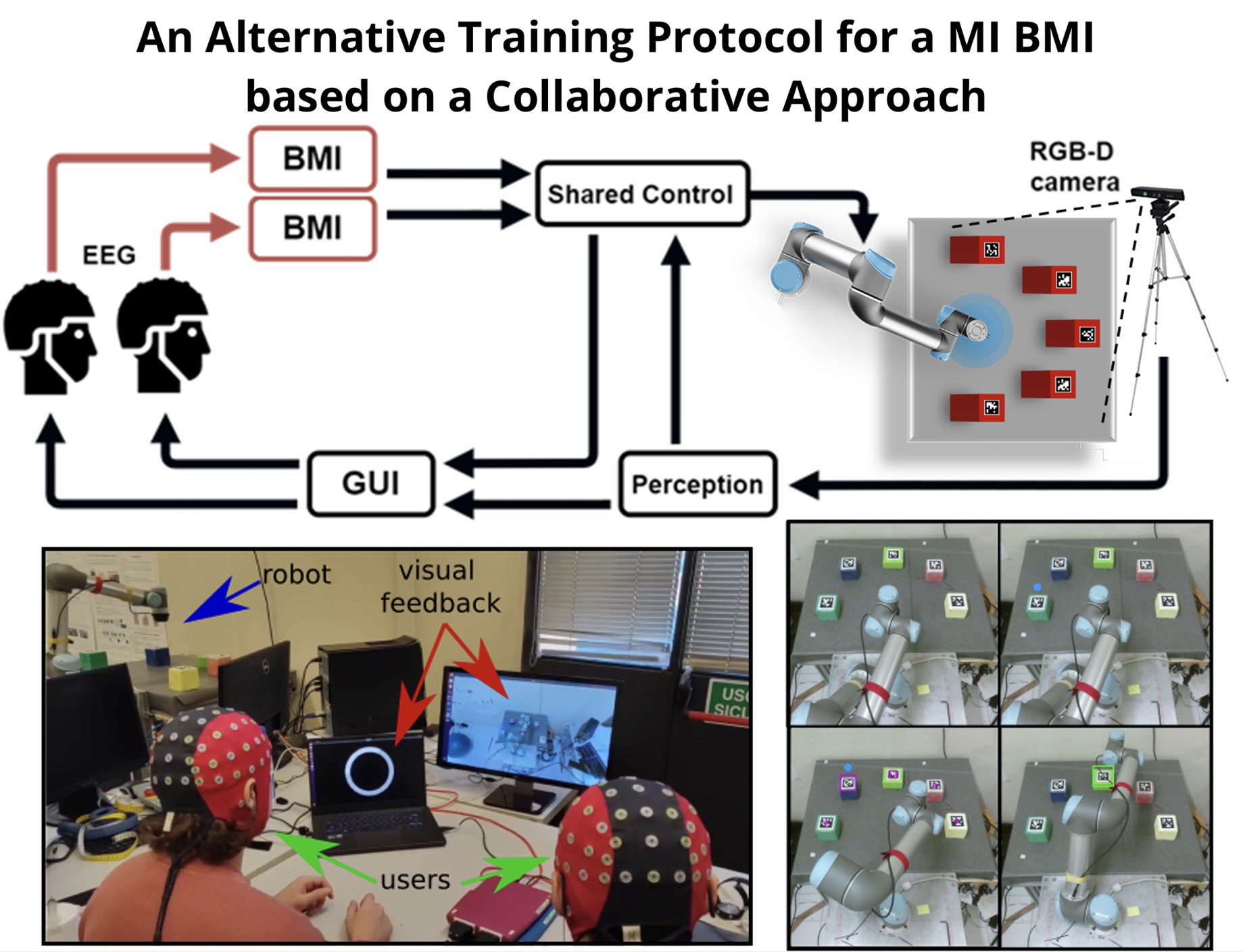
User intent and cognitive states are decoded through neural signals (e.g., EEG), attention tracking, or other neural-sensing modalities to guide robotic decision-making and adaptive control (e.g., shared autonomy). Conversely, the robot’s “brain” can communicate back to the human brain using neuromodulation or non-contact feedback cues such as visual patterns, or auditory signals—enabling a direct, closed-loop interface between cognitive states and machine intelligence.
🔺 (2) Human Brain ⟷ Robot Body (cHRI)
Thought-driven interfaces (e.g., BCIs) translate cognitive states into physical action, enabling control of robotic limbs, exosuits, or tele-operated robots via imagined movement, motor imagery, or mental workload. The robot body, in turn, conveys its intention or status back to the user through expressive gestures, non-contact body movement, visual indicators, speech, or sound—supporting fluid two-way cognitive communication.
🔺 (3) Robot Brain ⟷ Human Body (cHRI)
Intelligent robotic systems adaptively shape the user's experience by delivering context-aware feedback—via haptics, visual cues, auditory signals, or neuromodulation (e.g., brain or muscle stimulation)—based on the user’s physiological or affective state. At the same time, users can interact with the robot using body language, facial expressions, or voice commands, and other non-contact modalities to interact with the robot—allowing mutual understanding without the need for physical touch.
🔺 (4) Human Body ⟷ Robot Body (pHRI)
Here, physical interaction becomes central, as muscle activity, joint movement, and biomechanical cues (sensed via EMG, IMUs, or force sensors) drive collaborative behavior. This includes co-manipulation, shared locomotion, and synchronized motion between the human body and robotic components—enabled through wearable robots, soft exosuit, Co-Bots, and/or force-based feedback systems.
These interaction loops are made possible through multi-modal sensing and actuation, combining EEG, EMG, IMU, skin conductance, eye tracking, and more. Achieving seamless integration requires careful co-design of software, hardware, AI, and physical interfaces to ensure that robotic systems align with the user's natural cognitive and physical processes.
Ultimately, NeuroDesign invites us to imagine and build technologies that are not only usable but embrace the richness of human cognition and embodiment. It informs us to design robots and interactive systems that understand us, respond to us, and evolve with us—in ways that are emotionally meaningful, neurologically intuitive, and functionally empowering.
📝💡 Suggested Submission Topics
We welcome submissions across a wide spectrum of human-robot interaction, including (but not limited to):
* Affective & Social Robotics
* Brain-Machine / Brain-Computer Interfaces (BCI)
* Wearable & Assistive Robots
* Exoskeletons & Rehabilitation Systems
* Human-AI Co-adaptation
* Embodied AI / Large Language Models for HRI
* VR/AR, XR, & Metaverse-based Interaction
* Haptics, Teleoperation & Sensory Feedback
* Cognitive & Physical Human-Robot Interaction (cHRI/pHRI)
* Neuroergonomics & Human Factors
* Soft Robotics & Bionic Systems
* Smart Environments & Pervasive Computing (IoT, Smart Homes)
* Multimodal Interfaces: Gesture, Speech, Emotion Recognition
* RoboEthics, Inclusion & DEI in HRI
* RoboFashion, Adaptive Wearables & Robot Skins
* Supernumerary Limbs, Human 2.0, & Intelligence Augmentation
* Anything that Connects Minds, Bodies, and Robots
📥 NE Submission
The NeuroDesign in HRI Innovation Expo & Competition is now open for submissions. This hybrid showcase invites undergraduate, master’s, and PhD students to present innovative concepts, prototypes, systems, and exploratory studies in HRI, BCI, neuro-inspired design, and related fields.
To reserve a spot for the 5-minute pitch presentation, participants may submit "Any One" or "Any Combination" of the following submission options:
🔺 (1) Video Abstract: A 100-word summary + 1–2 minute video overview
(A concise 100-word abstract and a 1-2 minute video, offering a brief yet engaging overview of your project.)
🔺 (2) Slide Deck: A 100-word summary + 5 informative slides
(A 100-word abstract accompanied by 5 detailed slides for a short but thorough presentation.)
🔺 (3) Extended Abstract: A 2-page write-up (IEEE RAS format)
(for a more in-depth submission)
IEEE Template: https://ras.papercept.net/conferences/support/word.php
🎤 Finalists & Presentation Format
Submissions will be reviewed on a "Rolling Basis", and approximately 10 projects will be selected for the final on-stage or online 5-minute pitch presentations. Finalists may participate in person, via Zoom, or by pre-recorded presentation. The selected finalists will be offered poster/demo space at the workshop venue, and posters for virtual participation will also be printed and exhibited onsite. We especially encourage submissions from students who have already presented related work at ICRA 2026 or published elsewhere, as this workshop provides an excellent opportunity to further increase the visibility of their research.
* 10 projects will be selected for on-stage 5-minute pitch presentations.
* Finalists may join in person, via Zoom, or submit a pre-recorded presentation.
* The selected finalists will be offered poster/demo space at our venue.
* We will print and exhibit posters for virtual participants.
🖼️💻Exhibition and Virtual Participation
The selected projects will receive a dedicated booth for poster and/or prototype demonstrations. For participants unable to travel to ICRA 2026, we will print out and "physically" exhibit your posters onsite and "virtually" display your posters on our website.
The event is designed to be "Hybrid" to ensure that everyone has the opportunity to participate, regardless of their ability to travel to ICRA (@ Austria). A Zoom link will be provided for your virtual participation.
🏆 Ne Awards & Recognition
(10 out of 10 finalists will receive an award!) 🏆 100% chance of winning opportunity
We are excited to present two prestigious award categories in this year’s competition. The "Best Innovation in HRI NeuroDesign Award" will recognize 3 outstanding projects demonstrating groundbreaking advances in Human-Robot Interaction NeuroDesign. The First Prize winner will receive €500 EUR, and the 2nd Prize winner will receive €250 EUR to support further prototyping.
In addition, the "Most Popular Project in HRI NeuroDesign Award" will honor 2 projects that win the hearts of our workshop audience, as determined by a popular vote. The First Prize in this category will win Raspberry Pi 5 (8GB RAM) and the 2nd Prize will get Raspberry Pi AI HAT+ (13 TOPS).
All remaining finalists will each receive a €50 EUR honorable mention award, and all finalists will receive official certificates in recognition of their achievements.
🔺 (1) 🧠 Best Innovation in HRI NeuroDesign Award
3 top projects selected by our expert panel based on originality, NeuroDesign alignment, and real-world potential.
Prizes:
🥇 1st Prize: €500 EUR
🥈 2nd Prize: €250 EUR
🏅 3rd Prize: €125 EUR
🔺 (2) ❤️ Most Popular Project in NeuroDesign Award
2 projects voted by workshop attendees and online audience for charm, creativity, and engagement.
Prizes:
🏆 1st Prize: Raspberry Pi 5 (8GB RAM)
zxc
🥈 2nd Prize: Raspberry Pi AI HAT+ (13 TOPS)
asd
🔺 (3) 🎁 Honorable Mention Award
The remaining finalists will each receive a €50 EUR honorable mention award, and all finalists will receive certificates. Kit x1 DIY Neuroscience s x1 Raspberry Pi 5 (16GB RAM)Ax1 Raspbery Pi AI HAT+ (13 Tops)
ux1 uMyo wearable EMG sensx1 Souvenir from Ei
==================================================
📅 Key Dates
🔺 * Submission Deadline: May 3, 2026 May 18, 2026
🔺 * Competition Day: June 5, 2026
==================================================
👉Material submission form: https://forms.gle/fQMxJtkXb8JEU2WR6
For any questions, feel free to reach out via our website submission form, or email us to: neurodesign.hri@gmail.com
Let’s shape the future of human-robot interaction—by design, for the brain.
Best regards,
The 4th Workshop on NeuroDesign in Human-Robot Interaction @ IEEE ICRA 2026
https://neurodesign-in-hri.webflow.io/





































.png)

































.jpg)






.jpg)